每次用都得重写一遍的 ResNet,干脆封装一个自己用的版本
· 5 min read

ResNet 算得上是超经典的backbone了,其网络提出了残差结构,可有效缓解随网络层数的加深而导致的梯度消失和梯度爆炸现象。结构和设计在这里有讨论。这里主要尝试一下复现。ResNet的常见形式有:
| Name | Top-1 error | Top-5 error |
|---|---|---|
| ResNet-18 | 30.43 | 10.76 |
| ResNet-34 | 26.73 | 8.74 |
| ResNet-50 | 24.01 | 7.02 |
| ResNet-101 | 22.44 | 6.21 |
| ResNet-152 | 22.16 | 6.16 |
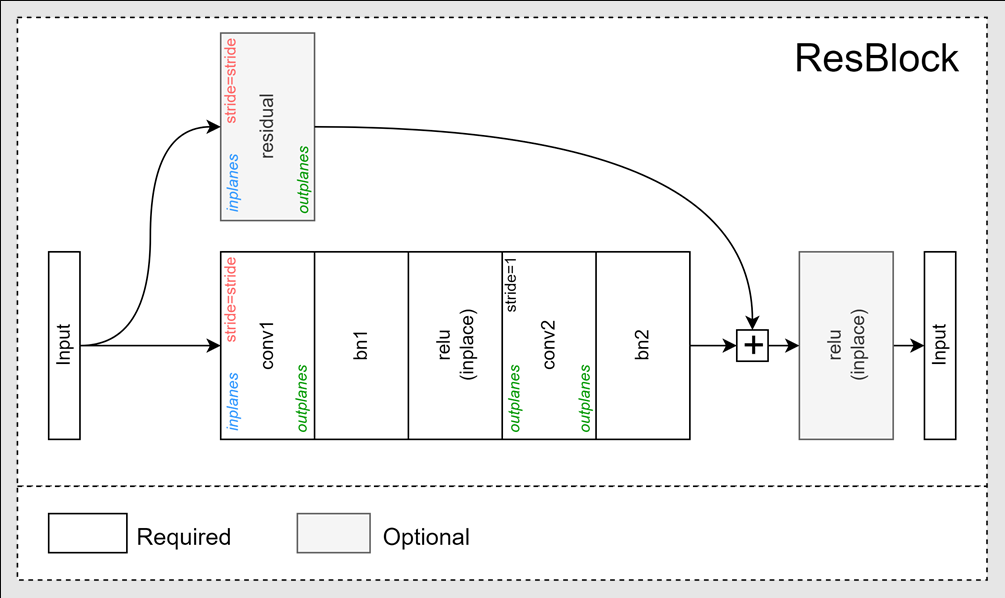
除了上述常见形式,也有将channel数减半的half形式,以及使用膨胀卷积的形式等。但是每次写的时候都要重新写一份或者重新找一份很麻烦。干脆自己封装一个可以调整结构的版本。初步设想是这样的:
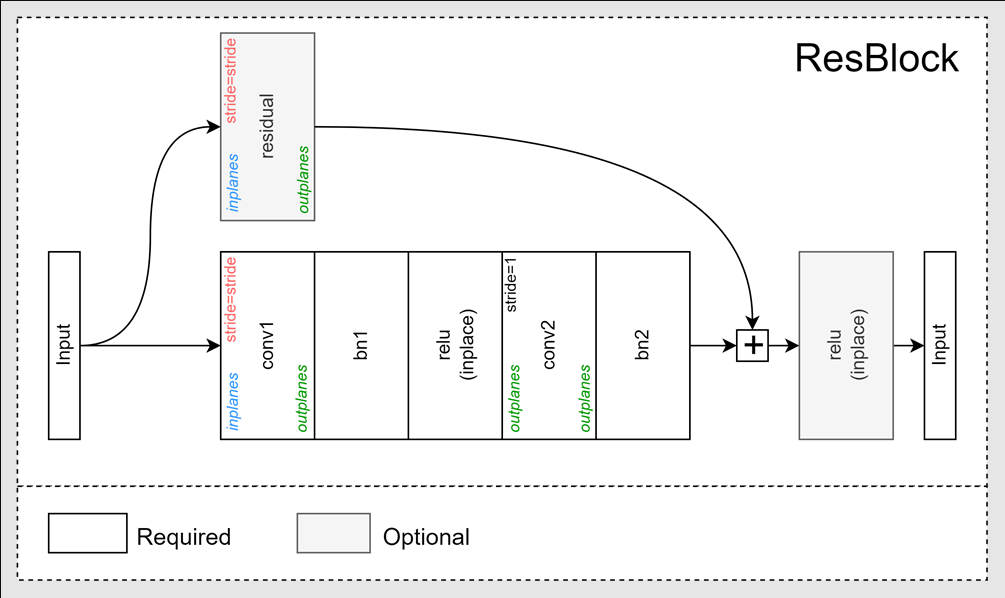
为了方便调整结构,封装的时候参数也多给一些,最后封装成了这样:
class ResBlock(nn.Module):
def __init__(
self,
inplanes,
outplanes,
kernel_size=3,
stride=1,
padding=True,
residual=False,
spatial_separable=False,
dilation=1,
depthwise=False,
pool_on_residual_downsample=False,
bn_momentum=0.1,
skip_last_relu=False,
):
"""ResBlock
Args:
inplanes (int): num of channel input
outplanes (int): num of channel output
kernel_size (int, optional): kernel size. Defaults to 3.
stride (int, optional): stride for downsampling layer. Defaults to 1.
padding (bool, optional): decide if use padding. Defaults to True.
residual (bool, optional): wether use residual. Defaults to False.
spatial_separable (bool, optional): set spatial separable for non-downsamping layers. Defaults to False.
dilation (int, optional): dilation rate. Defaults to 1.
depthwise (bool, optional): wether to use depthwise convolution. Defaults to False.
pool_on_residual_downsample (bool, optional): 'maxpool' or 'averagepool' if you want to use pooling instead of conv2d on residual path. Defaults to False.
bn_momentum (float, optional): momentum of batch norms. Defaults to 0.1.
skip_last_relu (bool, optional): wether to skip the last relu. Defaults to False.
"""
super(ResBlock, self).__init__()
residual_padding_size = kernel_size // 2 if padding else 0
self.conv1 = ConvNxN(
inplanes=inplanes,
outplanes=outplanes,
kernel_size=kernel_size,
stride=stride,
padding=padding,
dilation=dilation,
depthwise=depthwise,
)
self.bn1 = nn.BatchNorm2d(num_features=outplanes, momentum=bn_momentum)
self.relu_inplace = nn.ReLU(inplace=True)
if not spatial_separable:
self.conv2 = ConvNxN(
inplanes=outplanes,
outplanes=outplanes,
kernel_size=kernel_size,
stride=1,
padding=padding,
dilation=dilation,
depthwise=depthwise,
)
else:
self.conv2 = SpatialSeparableConvNxN(
planes=outplanes,
kernel_size=kernel_size,
dilation=dilation,
depthwise=depthwise,
)
self.bn2 = nn.BatchNorm2d(num_features=outplanes, momentum=bn_momentum)
self.residual = None
if residual:
if pool_on_residual_downsample:
assert inplanes == outplanes
assert pool_on_residual_downsample in ["maxpool", "averagepool"]
if pool_on_residual_downsample == "maxpool":
self.residual = nn.MaxPool2d(
kernel_size=kernel_size,
stride=stride,
padding=residual_padding_size,
)
elif pool_on_residual_downsample == "averagepool":
self.residual = nn.AvgPool2d(
kernel_size=kernel_size,
stride=stride,
padding=residual_padding_size,
)
else:
self.residual = nn.Sequential(
ConvNxN(
inplanes=inplanes,
outplanes=outplanes,
kernel_size=1,
stride=stride,
),
nn.BatchNorm2d(num_features=outplanes, momentum=bn_momentum),
)
self.skip_last_relu = skip_last_relu
def forward(self, x):
_x = self.conv1(x)
_x = self.bn1(_x)
_x = self.relu_inplace(_x)
_x = self.conv2(_x)
_x = self.bn2(_x)
if self.residual:
_x_res = self.residual(x)
_x = _x + _x_res
if not self.skip_last_relu:
_x = self.relu_inplace(_x)
return _x
然后可以这样使用(参数设计往下翻):
res_block = cnn.ResBlock(
inplanes=64, outplanes=128, kernel_size=3, stride=2, residual=True, dilation=2
)
res_block.eval()
output:
ResBlock(
(conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(2, 2), dilation=(2, 2))
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu_inplace): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2))
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(residual): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), dilation=(2, 2))
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
参数设计:
conv1表示下采样(如果步幅不为 1)Conv2d层。 如果“depthwise”设置为 true,则它将是深度卷积;如果“dilation”未设置为 1,则它将是扩张卷积。conv2表示步长为 1 的Conv2d层。如果depthwise设置为 true,则它将是深度卷积,如果dilation未设置为 1,则它将是扩张卷积。- 如果“residual”设置为 true,则“residual”表示“Conv2d”层,后跟“BatchNorm2d”(如果“pool_on_residual_downsample”设置为 false)。 否则,如果“pool_on_residual_downsample”设置为“maxpool”,则表示“MaxPool2d”层;如果“pool_on_residual_downsample”设置为“averagepool”,则表示“AvgPool2d”层。
- 如果
skip_last_relu设置为 false,那么最后会有一个ReLu。
| 名称 | 类型 | 描述 |
|---|---|---|
| inplanes | 整数 | 输入通道数 |
| outplanes | 整数 | 输出通道数 |
| kernel_size | 整数(可选) | 内核大小。 默认为 3。 |
| stride | 整数(可选) | 下采样层的步幅。 默认为 1。 |
| padding | 布尔(可选) | 决定是否使用填充。 如果为 true,则将自动计算填充大小。 默认为 True。 |
| residual | 布尔(可选) | 是否使用残差。 默认为 False。 |
| spatial_separable | 布尔(可选) | 为非下采样层设置空间可分离。 默认为 False。 |
| dilation | 整数(可选) | 膨胀率。 默认为 1 表示不使用扩张卷积。 |
| depthwise | 布尔(可选) | 是否使用深度卷积。 默认为 False。 |
| pool_on_residual_downsample | 布尔(可选) | 如果您想在残差路径上使用 pooli 而不是 conv2d,请使用“maxpool”或“averagepool”。 默认为 False。 |
| bn_momentum | 浮动(可选) | 批量规范的势头。 默认为 0.1。 |
| skip_last_relu | 布尔(可选) | 是否跳过最后一个 relu。 默认为 False。 |